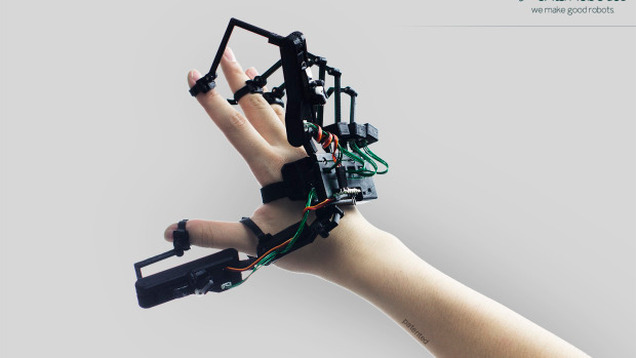
Dextra Robotics just held a Reddit AMA for this thing, a hand eating robo-spider a force feedback rig that lets you ‘feel’ virtual objects.
Here’s the bit about how it functions:
“It works like this, when the avatar you are controlling hits a digital object, a signal is sent back via our SDK to Dexmo F2 and the small actuators actuates, brakes the joint and locks the exoskeleton. When you further bend your finger inwards, a normal force will be created on your fingertip.”
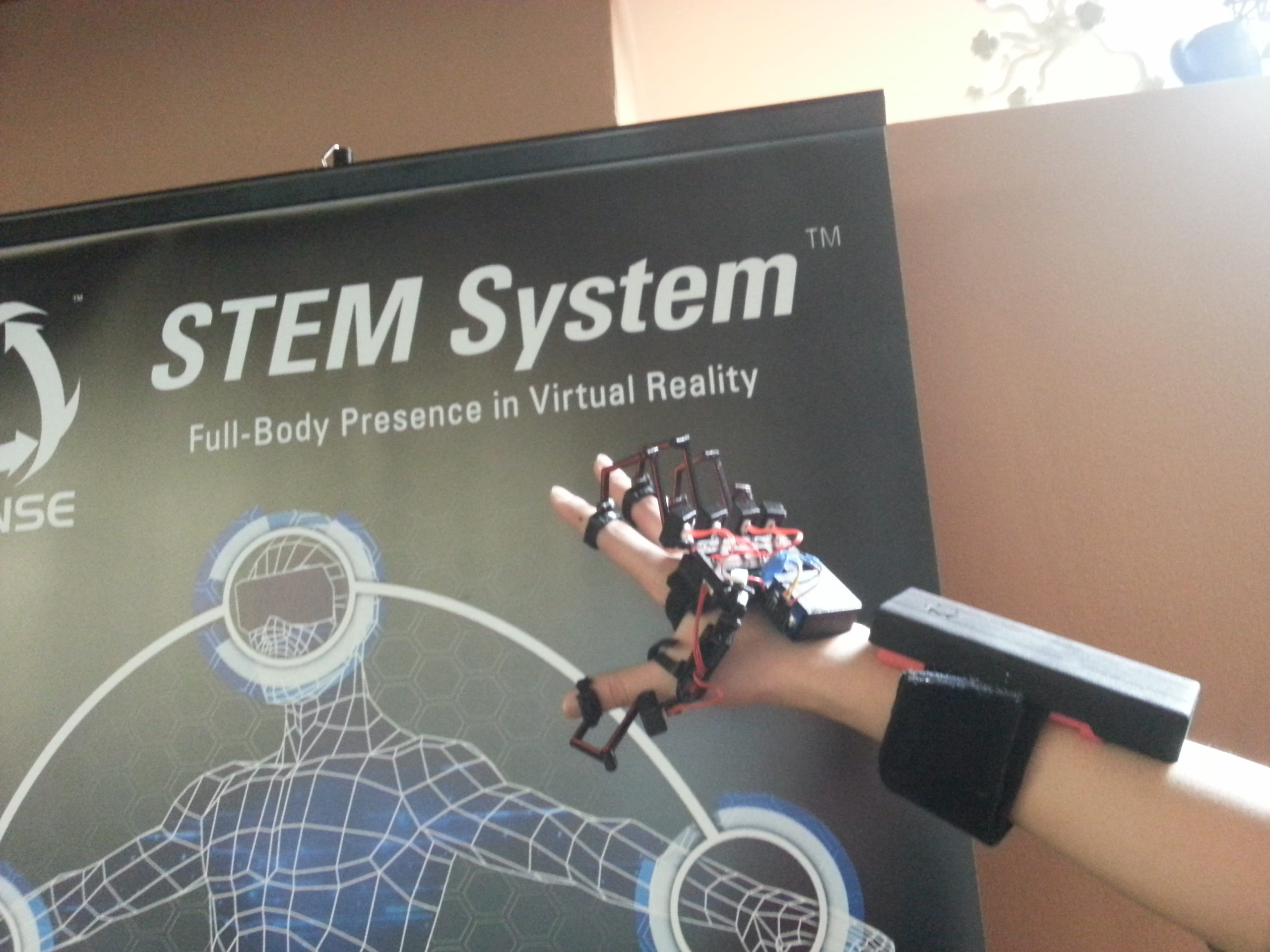
According to the details on the site, it seems to be part mo-cap rig for hands and part VR controller, which is what seems to be being pushed in the AMA. It also links up with the STEM controller system so that your strange metal hands can be placed accurately in virtual space:
It appears to be in the very early stages, as evidenced by the rough 3D printed prototype which Dextra says is fragile, hence the plan to make the final product out of metal. The early version has already been tried out in Unity to allow people to ‘feel’ surfaces, something that apparently took a non-Unity engineer a day to figure out.
However, you’re not going to be feeling anything too subtle just yet. The servo-based system can currently only create a digital sensation. So no degrees of softness, just “there” or “not there.” Games about hard wooden blocks? Good to go. Games about stroking puppies are going to take a while longer.
It will be hitting Kickstarter this month and if it gets funded, they’re talking about a $200-ish price tag depending on interest.

Comments
10 responses to “Soon You’ll Be Able To Touch Things In VR”
And the fingers too if this goes wrong!
Seriously though this looks like awesome tech, I would love to put on some gloves and feel VR.
That is cool. Would probably think of shelling out for this over ControlVR, as cool as it looks. STEM integration is awesome too.
We built a similar thing in 1987 using nitinol wires in the place of the complex sensor setup they have here.
It is so funny watching all this stuff come back again 25 years later, the old VR books are full of ideas just waiting to be re-exploited.
It’s strange that the Rift is being praised as ground breaking every other week for just upping the specs on a basic headset while not even trying to tackle problems like this, even though as you say a lot of the solutions are at least half out there.
Playing Destiny has really made me want VR but it doesn’t seem like it will ever happen when the biggest players in the field all seem to be hung up on making the perfect 1992 porthole viewer.
because the rift is a display first and a head tracking controller second.
If Jaron Lanier is still around, someone should pick his brain …
*supple
You’re all thinking it
Do what must be done Japan game industry!
Katamari Damacy VR? I’m with you pal. I always dreamed of rolling a planet-sized ball and punch it towards giant squids.
One day they’ll be able to make this things look like gloves and have it exert pressure at specific points so that it wouldn’t look as scary as that, but for now, it looks great that they’re even making something like this.
I’ve been talking about doing stuff like this for years so it’s good to be vindicated. Although I imagine that the first round of VR tech already had ideas like this.